这是一篇客座文章。本文代表的观点仅代表作者的观点,并不代表IEEE Spectrum 或者IEEE的立场。
虽然自1961年开始,机器人已经能够为人们准备早餐了,但在现实生活中,机器人的一般应用可能比自动驾驶更加复杂。但是,人们很难确切地指出原因。仔细观察1961年的视频,我们会发现双指并行机械手已足以完成各种任务,并且只需要将认知与常识编入机器人,就足以让机器人完成这些任务。事实上,最近的一篇科学文章提醒了我们,即使是基础密集的装配任务,例如,装配一件家具, 也完全属于当前工业机器人的范畴。真正的问题是需要操纵的动作太多,并且准备三明治所需的特定行为并不一定与组装椅子所需的行为相同。
从严格的工业角度来看,一般应用可能并不是一个值得专注的问题。事实上,你可以为任何东西来建造一台机器,从准备美味的浓缩咖啡,烧饭,收割麦田,或批量生产运动鞋。这就是目前大多数机器人在工业中的应用方式。即使那些作为“助手机器人”销售的产品也大多数都成为自动化生产线中复杂机器的一部分(它可以减少安全锁定)。任何学术界的尝试来开发那些更广泛的操作解决方案都是针对这些用例进行基准测试的。这使得一般解决方案的优势不那么明显,并且他们有可能陷入使得投资者和行业失去兴趣的低效率低谷。然而,制造和交付过程会涉及到很长一段高度变化的操作步骤。即使每个步骤的价值都可以忽略不计,它们的累计成本也是相当巨大的。
那么我们怎么知道一个最初的解决方案是能够获得收益的呢?圈内为此设计了一系列挑战,需要解决各种各样的任务或操纵各种各样的对象,包括RoboCup@Home,IROS操作挑战和亚马逊操作挑战。虽然这些挑战推动了解决方案,但是仍然无法定义任务的性质,使得专业解决方案无法更好地解决这些问题。例如,韩国大田IROS操纵比赛的获胜团队使用了一台Baxter机器人和一个自粘泡沫立方体系统来操纵菜肴和勺子等物品。同样,亚马逊挑战中的大多数项目都可以单独使用吸力来处理。我们真正需要的是一个单一的操作解决方案来解决上述所有的任务。
在东京举行的世界机器人峰会中,工业装配比赛为我们提供了不同的视角,该奖项奖励团队1500万日元(130,000美元)的奖金来寻找能在一天之内为一系列工业配套和装配任务提供一个普遍解决方案的获胜团队。团队需要先从箱子中挑选一系列尺寸各异的物品(从M3螺丝到电动机到柔性橡胶带),然后将它们放入一个套件中,然后将它们组成一个复杂的结构。比赛不仅需要团队掌握和操纵机器解决方案,而且未知的对象和任务强调解决方案必须在竞争当天易于重新编程。如果成功的话,这样的机器人可以像人类一样帮你组装家具,或者做一些人类可以快速掌握的操作任务,但是这样的机器人目前还没有出现。
吸力,抓力,和软体机器人
所以我们通过什么来实现机器人的一般运用呢?工业自动化有三种竞争式的主导:吸力,机械夹具和机械手,以及最近才出现的软体机器人。吸力目前最受欢迎的方法,因为吸盘是可以变形的并且能够在物体位置未知的情况下也一样能够环绕物体。然后可以施加真空条件使得洗盘变硬并产生一个环形的约束力来限制物体的移动。这是一个非常有吸引力的方法,因为一个单独的吸盘可以充分约束大量不同的物体。然而,抽吸不能解决每个抓握问题,例如,如果物品太重,孔太多,或者需要更加精确的力来进行进一步操作的时候。
使用机械夹具可以实现力的精确传导,机械夹具通常使用平行夹具或者两个四连杆结构。三指结构的机器夹具采用的非常少,并且从顶部抓取圆柱物体时表现优异。使用刚性机械夹具的挑战是夹具在运动时冲击力需要精确为零,这样以避免不期望的冲击。如果接触的物体是有弹性的,则冲击会被吸收从而导致物体以弹簧的方式高速弹开。为了减少不必要的弹跳,我们可以通过使夹具可变形使得接触更加可塑,比如提高感知精度使得夹具能够及时停止闭合,或者通过将物体锁定在夹具内以限制其可能的运动。
极端的来说,这些措施带来的是一个完全柔软的夹持器,其变形性可以防止物体弹跳,并且其顺应性减少了对高度准确感知的需要。较大的接触表面可以使得摩擦最大化并且降低物体的旋转自由度。打个比方,当使用双指夹具来抓取拥有两个横截面的栏杆时,我们希望将夹具的定位能够使得其指垫能够与栏杆的两个表面平行。柔软的抓手可能既不需要感知栏杆的位置,也不需要必要的行动计划,因为这样的抓手会围绕着目标物体。虽然软抓手的变形性有助于降低对感知和规划的需求,但是会很难以受控的方式对物体施加力。软抓手手中的物体形态不仅大多数是未知的,其变形性也妨碍了力的准确传递。当抓取和丢弃对象物件时可能不是问题,但是这样就使得包括简单的拾取和放置在内的任何操作都非常困难。
通过将简单的位置控制与限制电机相结合,可以实现机器人夹具良好的实际效果。与其完全可变性的软机器人一样,阻抗控制的抓手可以符合物体并弥补感知的不准确性。
因此,最佳的抓手必须尽可能地变硬或者变软,以尽可能的减少感知和规划来抓取物体,同时消除物体姿势的不确定性并提供事后处理的能力。同时,抓握表面一旦接触就应该继续保持。这可以结合之前的技术来实现。打个比方,使用颗粒干扰的方式让软抓手变硬,或者通过包围抓握来补充抽吸结构以提供额外的束缚。类似地,机械夹具可以通过抽吸装置或静电垫来增强,以实现可逆粘合。人类的手掌在结合这些特性方面做的非常出色:坚硬(骨骼)和柔软元素(韧带和肌肉)的组合使其能够改变其刚度,使我们在抓握物体时能够贴合物体,同时,能够精确控制我们的工具。这些效果得益于我们只见的柔软衬垫,皮肤的摩擦性能,甚至只需用一根手指捡起一张小纸张就能出其粘性。
扭矩控制的抓手
有一些暂未使用到的成果可以让我们结合软抓手和传统抓手的优势,创造商业上可行的通用解决方案。其中之一是应用于传统双指夹持器的阻抗控制。如果我们控制结构的阻抗,我们就会控制对环境施加的外部运动的抵抗力。通过将简单的位置控制和限制电机可以施加的最大扭矩阵相结合,可以实现机器人夹具的良好实际效果。通过限制扭矩,刚性夹具可以任意地(在其扭矩传感器的精确范围内)变形。与其完全可变形的软机器人等效物一样,阻抗控制的抓手可以适应物体并弥补感知的不准确性。与此同时,这种设计也可能使机械手变得过于僵硬而无法精确操纵物体。机械手上用来感测方位得阻抗控制也是触觉感测的一种形式。具体地说,夹具将能够通过监测位置和扭矩来检测环境中物体的存在。因此,产生的运动更加温和,弥补了不准确的感知。
控制矩阵的夹具也可以成为一个平台,将软机器人研究的最新成果整合到工业实践中:通过抽吸装置在其尖端增加手指,它们的手掌结合了精确控制位置和力的优点,以及基于抽吸的坚固性抓手性能。手指关节处的矩阵感测可以通过测量压力的触觉传感器来增强,并且策略性地放置在夹具上。手掌和尖端上的触觉传感器可以帮助区分手指运动是否被障碍物阻挡或者通过与其被接触物质的相似性来进行区分。触觉传感器还通过确定何时进行接触来直接补充视觉传感器的功能,从而改善物体姿态的预估,以及在手中握住物体的位置。
然而,最近3D感知的进步使我们比以往更接近一般操纵。英特尔实感技术等3D传感器能够感知距离能够感知距离摄像机近11厘米的物体,精确度可以制作非常小的物品,比如M3螺丝,以及来自于我公司Robotic Material Inc的集成解决方案的商用化,我们刚刚发布了机器手的测试版。它拥有精确的3D感知,阻抗控制能够让机器手温柔地与外部环境互动,并且装配了各种用于评估触觉感知方式成功的方法,使其可以在不确定的环境中实现强大的移动操作。
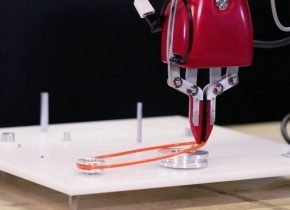
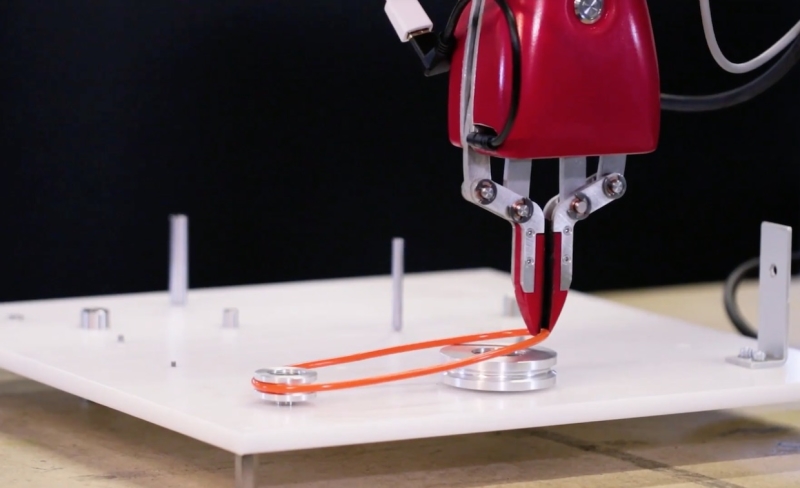
打个比方,我们最近展示了一个移动物件的任务,要求机器人从桌子上已知位置的箱子中取出三个不同的物品(M3螺丝,注塑器,橡胶带)。如果使用自动推车,那么误差的不确定性会达到10厘米左右,但是机器人能够凭借3D感知来定位各个箱子以及其中的物品。然后使用限制扭矩使得机器手与箱内物品轻轻的接触并最小化可能碰撞的影响。最后,使用扭矩测量的触觉感测来评估抓握的成功率。
在移动物件比赛中的机械操作。这个视频中,箱子的位置是已知的,并使用集成在机器人手中的3D感知进行登记。阻抗控制用于稳定机械手与箱子及箱子内物品的接触。
尽管它们具有令人影响深刻的通用操纵功能,但3D感知,阻抗控制和触觉感应与主流的专业操作解决方案并不一致。任何形式的传感都需要时间并对末端执行器的速率施加硬性控制,这样能够在意外碰撞的情况下限制冲击力。因此,一般应用的驱动因素是中小型企业,它们正在处理种类繁多但是数量较小的产品,以及那些希望能够通过更快的生产周期和更高程度的定制程度来区分其产品。于此同时,移动机器人在仓库,酒店和医院中使用的越来越普遍。在这样的情况下,诸如装载,卸货,和简单维护等特定操作任务可能会极大的放大这些机器人的价值主张,从而创造解决一般应用所需的经理力量。
Nikolaus Correll 是科罗拉多大学博尔德分校的副教授,也是Robotic Materials Inc的创始人和首席技术官,他在那里开发了具有3D感知,触觉传感和计算功能的机器人抓手。