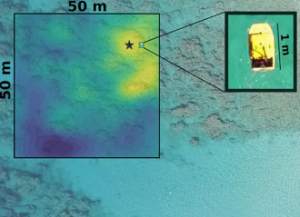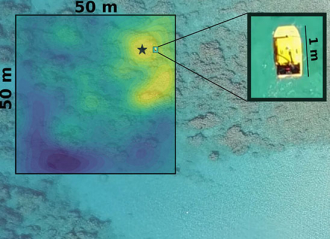
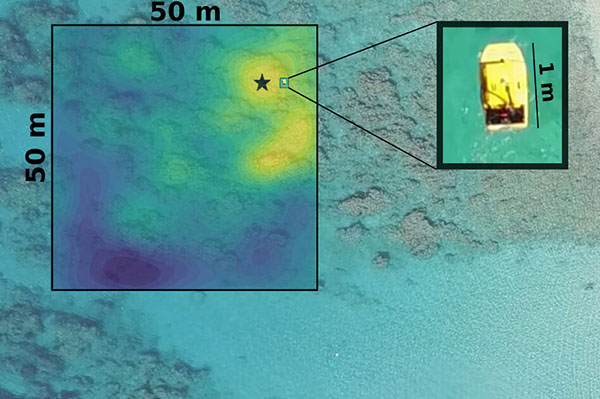
即使是在未被探索过的水域中,由麻省理工学院开发的机器人系统也可以高效地识别出很有价值的位置进行采样,这些位置通常难以找到。如图所示,当该系统被配置在远离Barbados海岸的自动驾驶船上时,它能快速甄别出最明显的珊瑚头部区域——意味着珊瑚头部位于最浅的地方,这对于研究接触阳光(sun exposure)对珊瑚器官的影响很有帮助。 (图片来源:麻省理工学院)
在广阔而未被探索过的水域中,一套由麻省理工学院和伍兹霍尔海洋研究所(Woods Hole Oceanographic Institution,WHOI)的研究者开发的自动机器人系统可以高效地识别出最具有科学研究价值的采样点,而这些点通常是难以发现到的。
环境学家通常对收集位于特定位置的样本很感兴趣,这些最有研究价值的位置被称为“最大值(maxima)”。举个例子,化学物质泄露的地点就是这样一个位置,它的浓度(concentration)最高,而且极有可能不会被外界因素所影响。当然,“最大值”可以是研究者所希望测量的任何可以被量化的指标,例如水深,或者珊瑚礁(coral reef)暴露在空气中最多的部位。
部署“最大值”搜寻机器人往往效率低、精度差。通常情况下,机器人都会像割草机一般迂回行动来覆盖一片区域,这耗费了大量的时间,并且收集到了很多没有研究价值的样本。其他的一部分机器人可以感知并跟踪高浓度化学物的轨迹,从而找到泄露源,但它们仍然可能被引入歧途。举个例子,化学物质可以扩散开来,并在距源头很远的裂口处聚集,而机器人可能会认为这些高浓度的点就是源头,但实际上还有很远的距离。
由智能机器和系统国际会议(International Conference on Intelligent Robots and Systems,IROS)出版的一篇论文上公布了一套名为“PLUMES”的系统,它可以使得自动移动式机器人更快和更有效地探测“最大值”。在导航并识别障碍物、突变的水流和其他变量时,PLUMES应用了概率方法来预测最有可能通向“最大值”的路径。当它采集样本时,它将利用所学到的知识评估是沿着当前这条可能的路径继续下去,还是搜寻另一条未知的路径——那里可能会藏有更有价值的样本。
重要的是,PLUMES可以在不被那些捉摸不定的高浓度点所影响的情况下抵达目标点。“这很重要,因为你很容易认为你找到了金子,但实际上它只是看起来像金子。”Victoria Preston说道,他是计算科学和人工智能实验室(Computer Science and Artificial Intelligence Laboratory,CSAIL)的一名博士生。他参与了这项课题,也是文章的共同第一作者。
研究者将PLUMES系统部署在机器人船上,它成功在Barbados的Bellairs Fringing Reef处探测到了暴露面积最大的珊瑚头部,这意味着珊瑚头部位于最浅的地方,这对于研究接触阳光对珊瑚器官的影响是非常有帮助的。在水下环境中进行的100个不同的模拟测试中,一个虚拟PLUMES船也同样在指定的时间内,在“最大值”处采集到了更多的样本,并且比传统方法获得的数量多了七到八倍。
“PLUMES只需要所必需的最小量信息就能探测到‘最大值’,便可以迅速在这里采集有价值的样本。” CSAIL的另一名博士生Genevieve Flaspohler说道,他也参与了这项课题,并同样是文章的共同第一作者。
参与文章的其他人员是:来自WHOI应用海洋物理和工程系的两名科学家Anna P.M. Michel和Yogesh Girdhar;以及来自CSAIL和航天航空系(Department of Aeronautics and Astronautics)的教授Nicholas Roy。
在“发掘-探索”矛盾中前进
PLUMES的洞察力主要体现在,其利用概率方法来解决极为复杂的矛盾,即:是发掘已经获知的环境,还是探索未知的、可能有更大价值的区域。
“在寻找最大值的过程中,最大的挑战在于让机器人平衡是从它已经知道的、具有高浓度的区域中发掘信息,还是探索它不知道的地方。”Flaspohler说道。“如果机器人总是在探索,它就不会在‘最大值’处收集足够有价值的信息;相反,如果它探索地不够,就可能完全错过‘最大值’。”
当装有PLUMES系统的机器人进入新的环境中时,它会使用一种称为高斯过程(Gaussian process)的概率统计模型对环境变量做出预测,例如化学物质浓度,并估计探测的不确定程度。然后,PLUMES会生成机器人可以选择的所有可能路径的分布,并通过之前的估计值和不确定程度对每一条路径进行排序,这样便可以决定是应该探索还是应该发掘。
起初,PLUMES会随机选择环境中的路径进行探索。而每一个样本都提供了环境周围关于目标值的新信息——例如最高浓度化学物质的点或最浅深度的点。高斯过程模型通过分析数据来减小机器人可以选择的路径数量,这些从给定点到样本的路径具有较高的值。PLUMES使用了一种新的目标函数——这种方法通常被用在机器学习中来最大化奖励(reward)——来让机器人判断应该发掘过去的知识还是应该探索新的区域。
“预知”路径
决定去何处搜集下一个样本,取决于系统从当前位置预知所有可能的、未来的动作的能力。为了做到这一点,系统使用了蒙特卡洛树搜索(MCTS)的改进版本,这是一种路径规划方法,广泛用于处理复杂游戏(例如围棋和国际象棋)的人工智能系统中。
MCTS使用了决策树(decision tree)——一种用节点和线连接起来的图——来模拟一条路径,或者运动的序列,这些都是抵达最终位置所需要的行动。但是在游戏中,可能路径的空间是有限的,而在未知的环境中时,由于实时变化的动力学因素,空间可以变换为无限大,这就使得规划变得非常困难。研究者设计了“连续观测蒙特卡洛树搜索(continuous-observation MCTS)”,这种算法应用了高斯处理,以及一种新颖的目标函数来搜索这一片繁杂但存在可能路径的空间。
这种蒙特卡洛树搜索的根是从“已知(belief)”节点开始的,这就是机器人可以立即采取的下一个步骤。这个节点包括了机器人从开始到当前节点整个行为和观测的历史信息。然后,系统通过扩展树结构,从根部生长出新的线和节点,并检查若干步未来的步骤,这些步骤将影响机器人决定是驶入探测过的区域还是未探测过的区域。
接着,系统将模拟从每一个新生成的节点中采集一个样本后会出现的情况,这基于它在之前的观测中已经学习到的特征。基于最后节点的模拟值,整个路径会接受到一个奖励得分,高的得分意味着更加有效的行动。所有路径的奖励得分会反馈到根节点中。机器人选择得分最高的路径,执行一步步骤并收集到一个真实的样本。然后,它使用真实的数据来更新高斯处理模型,并重复这个“预知”过程。
“只要系统不停地去预知,在未知的世界中就可能会出现一个更高的分值,所以它必须不停的探索。”Flaspohler说道。“直到它最终完全收敛到一个点,在这里它会评估出最高的得分,因为它无法再预知出一条有更高分值的路径,此时它才会停止探索。”
现在,研究者正在和WHOI的科学家合作,使用安装有PLUMES系统的机器人来在火山遗址附近定位化学悬浮物(plumes),并研究北极融化的海岸线河口区域(coastal estuaries)的甲烷释放情况。科学家对于化学气体释放进入大气中的源头很感兴趣,但是这些研究的地点可能横跨数百平方英里。
“他们可以使用PLUMES,花费更少的时间来探索那些广阔的区域,从而专注于采集具有科学价值的样本。”Preston说道。
作者:Rob Matheson
翻译:刘一尘
审校:郝豪
引进来源:来自麻省理工学院