《无线电》
开博时间:2016-07-01 14:43:001955年创刊,是国内电子科普领域创刊最早、发行量最大的知名杂志,累计发行量超过3亿册,倡导科普、兴趣...
创意科技总动员——《无线电》第09期
2012-09-25 13:49:54好奇号火星车成功在火星表面着陆
据美国航空航天局(NASA)官方网站消息称,其最先进的好奇(Curiosity)号核动力火星车,8月6日已在火星表面着陆,它将探索火星过去或现在是否存在适宜生命存在的环境。此次火星登陆行动的成功及该火星车的尖端配备,彰显了人类火星探索技术的又一次进步。
好奇号火星车是人类迄今在其他星球登陆的最精密移动科学实验室,亦凭借25亿美元的总投资成为迄今最昂贵的火星探测项目,重要性堪与哈勃太空望远镜比肩。
2011年11月26日,好奇号于佛罗里达州卡纳维拉尔角空军基地发射升空,经历了长达8个半月的旅程才渐渐接近目的地火星。由于好奇号重达900多千克,6日的着陆没办法采取那些个头较小、重量较轻的“前辈”们的方式——包裹在气囊内直接“摔”在火星表面,它只能间接利用助降系统缓慢地接近火星表面。
这种被称为“有史以来最复杂的登陆”,要求好奇号借助降落伞和空气阻力先穿透火星大气层,达到一定高度时,颇似科幻电影中UFO一般的喷气悬降系统启动,用绳缆缓慢、平稳地将好奇号放下——而从进入火星大气层到着陆的时间段,就是NASA此前一直戏称的“恐怖7分钟”。期间好奇号的时速由2万km骤然降至为零,风险极大,遭遇的问题也不是地球工作人员可以预料和操控的,成功的几率可能只有四成。
幸而,这一天是好奇号的“幸运日”。在等待完这揪心的7分钟及十几分钟的信号延迟后,NASA终于收到了火星车平安的信息并收到传回的图片。好奇号着陆在火星盖尔陨坑中心山脉的山脚下,早期研究显示此地可能富含水及碳化合物。接下来,好奇号将凭借着核燃料钚提供的动力,在火星表面显露它超强的连续行驶能力及机动能力,展开为期一个火星年(约687个地球日)的探测活动。
日本打造人型可驾驶机器人
日本东京的水道桥重工公司研制出一款名为“Kuratas”的未来色彩武器系统。Kuratas是一个超级机器人,高约4m,重4t,装有格林机关枪。它拥有自动瞄准系统,允许操作人员锁定敌人,在操控者微笑时便会发射,每分钟可发射6000枚BB子弹。由于意识到这一系统可能存在缺陷,研制团队在视频中警告称,驾驶员在操控Kuratas的武器系统时不要总笑。Kuratas的4条腿装有轮子,便于运输,最高时速可达到10.4km/h。
Kuratas既可以由坐在驾驶舱内的操作人员进行控制,也可借助联上3G网络的智能手机从外部进行控制。这款机器人售价140万美元,共有大约30个液压关节,可通过操作人员的身体移动进行控制。Kuratas共有16款颜色,其中包括黑色和粉红色,如果愿意额外支付94美元,买家还可以获得一个杯托。
美国海军启用新型水下机器人探测水雷
美国麻省理工学院、美国海军研究局(ONR)和美国蓝鳍机器人公司(Bluefin Robotics)联合研发的第3代悬停无人水下自主航行器(HAUV 3)能够检测到军舰底部的水雷。HAUV 3的外形类似于一种水下飞碟,十分小巧,两名船员即可搬运,当其在船只附近行动时,可通过声纳摄像机发射信号。一旦对船只的外形完成评估,HAUV 3可以更靠近船只,并能够探测出iPhone尺寸大小的水雷。
这套机器人系统能够扫描从靠泊区域到桥梁,甚至船坞区等各种环境下的水下结构。通过在传感器外加装不同的功能罩,它还能够被用来检测水下贮罐的内部结构。
不过研发人员也表示,目前这种机器人的能力仍存在诸多限制因素。首先,这种机器人的智能性仍不强,目前尚不能很好地在船体异常与水雷之间做出区分,所以这种情况下仍需要依赖操作人员用肉眼识别机器人发送回的图像信息。其次,尽管这种机器人能较好地对大部分船体进行扫描,但是在面对螺旋桨、船舵等复杂结构时,潜水员的表现往往更加出色。
蓝鳍机器人公司CEO戴维•凯利表示,美国海军目前已订购了15套双机器人系统,其中一套已经交付,并被机动潜水救援第2小队使用。每**立的机器人成本约为50万美元。
一款游泳机器人问世
这款名为“Swumanoid”的游泳机器人是由东京工科大学的一个研究小组研发并制造的。据该小组负责人亘中岛副教授介绍,为了设计这款会游泳的机器人,他们使用了大量的3D扫描仪技术来记录真实游泳者的每个动作细节。在机器人身上,共有20个由电脑操控的小型防水发动机。通过这些发动机,研究人员就可以轻松地让Swumanoid模仿人类的游泳动作了。
“经过我们的调试,它已经学会了仰泳和自由泳的动作。不过,如果我们还想让它掌握蛙泳的动作,就必须给它换一双新的腿。”亘中岛教授说,“目前,它在水中前进的速度能够达到6m/s左右,比当今世界纪录保持者的速度还要快30%。因此,我们希望能够将其应用于海岸巡逻和救生,这样能够节省不少的人力和物力,增加救援成功几率。”
除此之外,Swumanoid机器人其实还肩负着一项特殊的任务,那就是为科学家研究游泳技术动作提供相关数据。在此之前,人们想要对某种泳姿的技术要领进行深入的记录和剖析是非常困难的,因为实验对象随身携带的感应器非常容易在水中失灵,而且几乎没有人能够丝毫不差地重复同一个动作。然而,有了这款机器人,科学家就能够更好地研究如何通过技术动作的改进,提高游泳者在水中前进的速度。
意大利研制出类人机器人,可做出多种表情
意大利比萨大学的机器人专家研制出一款能够做出多种表情的类人机器人。这款机器人名为“FACE”,能够做出快乐、悲伤、恐惧等多种与人类一样的表情。FACE的问世意味着科学家在朝着研制先进类人机器人的道路上又往前迈进一步。
FACE是比萨大学30年不懈研究的结晶。它的面部装有32个电机,用于模仿不同的表情,进一步接近所谓的“恐怖谷理论”。恐怖谷理论是一个关于人类对机器人感觉的假设。当机器人与人类相像超过95%的时候,细微的差别也会让它们显得非常刺眼,让机器人显得非常僵硬、恐怖,导致人类有一种面对行尸走肉的感觉。
FACE以一名研究参与者的妻子为雏型,逼真度极高。研究小组利用一款名为“HEFES”的软件让FACE模拟人类的表情。HEFES通知电机如何做出反应,模拟表情。此外,这款软件也能够将不同表情在一定程度上混合在一起,例如微笑的表情混合着些许悲伤,大笑中掺杂着一点不安。
全球首款可堆叠移动电源问世
Exogear公司最近宣布他们即将推出全球首款可堆叠移动电源Exovolt Plus,Exovolt Plus由一个核心电池和若干个拓展电池组成,核心电池可以直接给设备充电,拓展电池不能单独使用,只能通过连接核心电池再给设备充电。
Exovolt Plus采用了颇具苹果风格的圆角设计,总体外形较为平滑。理论上说,Exovolt Plus可以连接无数个拓展电池,只要你背得动,永远不用担心你的手机或平板电脑会没电。
根据官方给的数据,核心电池和拓展电池的容量皆为5200mAh,输入输出电压为5V±0.5V,最大电流2A。单个电池重量约为156g。Exovolt Plus原本是专为iPod、iPhone和iPad设计的,不过由于其支持30针、USB和micro-USB三种接口,所以绝大多数智能手机和平板也可以用它来充电。
Exovolt Plus目前还未正式上市,官方给的预计售价是核心电池90美元,拓展电池50美元,预计年底消费者就可以买到这款可堆叠移动电源。
我国开发出第2代水上仿生微型机器人
一年前,由哈尔滨工业大学潘钦敏教授率领的研究团队首次开发出一种可以模仿水黾在水上行走的仿生微型机器人,现在他们开发出了第2代水上仿生微型机器人。新的机器人不只能在水上行走,还能在水上连续跳跃。其敏捷跳跃的能力,可以在从事军事侦察、水污染监测或其他任务时躲避障碍。
据潘教授介绍,研究人员以前已取得了一些关于微型机器人在水面上行走的进展,例如可以掠过湖泊和其他水体以监测水质等。然而,即使是最先进的设计,也只能使其在水上行走,制造出真正能够在水上跳跃的机器人比较困难,因为通常需要通过它用腿蹬踩水面形成向下之力才可将自身推到空中。
这个可以在水上跳跃的机器人采用一种新型驱动系统,包括微型直流电的发动机、减速器齿轮装置。在材料设计上,使用多孔超疏水泡沫镍来制造机器人的3个支撑腿及2个跳跃腿。尽管该机器人自身重量有11g,相当于1100只水黾,在实验中其每次跳跃前进的高度却有将近14cm,跳远的距离达35cm,是其自身长度的两倍还多。
思维克隆机器人
“宾纳48”由美国佛蒙特州的Terasem运动基金会出资,美国机器人设计师大卫·汉森花费3年时间制作完成,其硬件造价约为12.5万美元。它的外形按照Terasem运动基金会共同创始人宾纳·罗斯布拉特女士打造,面部皮肤由汉森发明的仿生皮肤材料“frubber”制成。在小型电机驱动下,“frubber”能够使机器人做出人类的面部表情,比如厌倦、高兴、筋疲力尽和困惑等等。因此,虽然只有脑袋、脖子和肩膀,但宾纳48的仿真性仍然非常高,足以以假乱真。
为了让宾纳48具备更多“人”的特征,制造者还对罗斯布拉特进行了约20个小时的采访。罗斯布拉特讲述了自己从童年到成人的生活,以及她的信念和个人感受。这些信息被整合成“思维文件包”,上传到宾纳48的“大脑”——人工智能资料库中。
Terasem运动基金会运营主管、宾纳48的“保姆”布鲁斯·邓肯表示,“这个过程给了宾纳48人类的个性。她具有哲学思维,喜欢电影、音乐和诗歌。有时候,她还非常幽默,能够讲笑话……她能根据场合来判断什么时候可以讲笑话”。邓肯透露,宾纳48能够从与人类的互动中进行学习,不断进步。
宾纳48目前能进行3种类型的对话,一种是谈论天气等普通情景,第二种是百科全书式的知识性问答,第三种就来自于罗斯布拉特的“思维文件包”。
邓肯说,随着时间的进展,此类技术的成本会有所下降,每个人都有能力为自己打造“化身”。此外,这项技术也能够用于教育,让机器人成为给后代们讲述人类历史的讲师。
新型电子传感器灵敏度似人体皮肤
韩国首尔大学的研究人员从甲虫的翅膀获得灵感,研发出一种柔韧的电子传感器。研究人员解释说,当甲虫休息时,其翅膀上和身体上的两排毛发会通过一种名为范德华力的静电吸引力相互锁定,他们借鉴了甲虫鞘翅间的这种锁合结构,利用交织在一起的“毛发”制成了该电子传感器。
“毛发”实际上是直径100nm、长1μm、外覆导电金属涂层的聚合物纤维。将聚合物纤维层像三明治一样夹在一起,这些纳米“毛发”就会互相吸引并彼此锁定。用聚合物制作的柔软防护层将其“包裹”住,并用电线连接起来,便可作为传感器使用。当按压、揉搓或刷拭传感器时,“毛发”的位置发生改变,传感器的电阻也随之变化。小至5Pa的压力都可被其探测到,这是比最轻的触摸还要柔和的力度。
通过分析电阻如何响应机械应力而发生变化,以及力移除时电阻又是如何恢复的,研究人员可以区分3种不同类型的机械应力:来自上方的压力、沿表面摩擦滑动的剪力和扭转产生的扭力。人体皮肤能够区分这些力,但大多数人造传感器做不到。研究人员表示,其他传感器只能感测到总作用力,却无法判断力的方向。
电子皮肤也需具备很高的空间分辨率来定位压力的施加点。研究小组展示了他们的设备的分辨率:利用一个64像素的8cm×5cm传感器网络,追踪两只瓢虫沿其表面的蜿蜒漫步。他们还记录了一滴水滴跳跃的路径,并显示该传感器片也可以绑在一个人的手腕上来测量其脉搏。研究人员说,他们正在同一家医疗保健公司探讨利用这种材料开发心脏监测器的可行性。
英国科学家们研制出迄今为止最轻的材料
英国基尔大学和德国汉堡科技大学的科学家们研制出了迄今为止全球最轻的材料“飞行石墨”(Aerographite),其密度仅为0.2mg/cm3。虽然它看起来像一块黑色不透明的海绵,但却是由99.99%的空气构成。研究人员表示,新材料性能稳定,具有良好的导电性、可延展性而,且非常坚固,因此,可广泛应用于电池、航空航天和电气屏蔽等领域。
“飞行石墨”是由多孔的碳管在纳米和微米尺度三维交织在一起组成的网状结构。尽管其质量很轻,但弹性却非常好,拥有极强的抗压缩能力和张力负荷。它可以被压缩95%,然后恢复到原有大小。它还几乎能吸收所有光线。
因为其独具的特性,“飞行石墨”能被安装在锂离子电池的电极上,这就使电池需要的电解质溶液很少,电池的质量由此大为减轻,得到的小电池可以用在电动汽车或电动自行车上。其未来的应用领域还包括让合成材料具有导电性,困扰很多人的静电干扰可能会因此得以避免。
另外,“飞行石墨”还可以应用于航空航天和卫星领域所用的电子设备上,因为这些设备必须能耐受大量的振动;而且,新材料也有望应用于水净化方面,作为吸附剂吸附水中的污染物,因为它能氧化或分解并移除水中的污染物。其卓越的力学稳定性、导电性以及表面积大等优点也会让科学家们大大受益,甚至还可以用于恒温箱或通风设备,以净化环境空气。
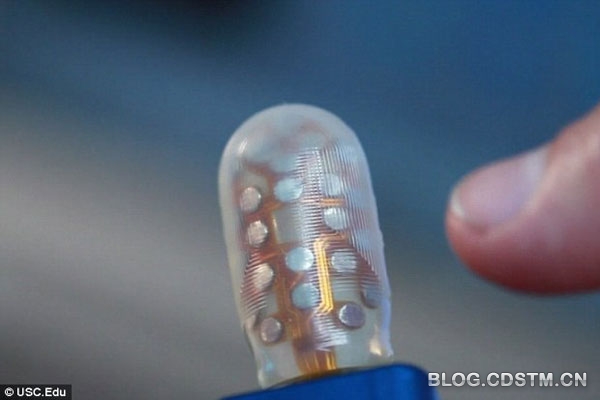
能分辨触摸面材质的机器手指
近日,科学家研发出一种比人类手指的触感更为灵敏的机械手指。这种被称为BioTac的传感器对各种物体的辨识率高达95%,远远超越人类的判断能力。机械手指“皮肤”上的指纹给了其优异的精确感知性,与以前类似的机械设备相比,机械手指的敏感度无疑更胜一筹。
据报道,与人类的组织类似,机械手指上有一层充满特殊液体的表皮。其工作原理也与人类如出一辙——中心部位的“类骨骼核心”控制着机械手指的运动。在水下环境中,机械手指依靠内置的一种被称为水听器的微型麦克风来侦听声音,从而感知振动,来辨识物体。
这个机械手指出自南加州大学的工程学院的研究,生物医学工程教授Gerald Loeb和博士生Jeremy Fishel表示,此项研究可用于医学假肢或者高级机器人的研究。利用感应器,机械手指还可以感知受力方向并监测温度。