





日期:2016年6月1日
来源:哈佛大学维斯生物工程研究所(Wyss Institute for Biologically Inspired Engineering at Harvard)
总结:要让机器人更好地配合并模仿人类,它们必须变得更加柔软和安全。一种新型执行装置能够利用真空压力驱动柔软的胶制“骨骼”,它动作起来就像真实的骨骼和肌肉那样。而且,它也同真实的肌肉一样柔软、减震,不论是对所处环境、同它们一起工作的人类,还是将来可能装备的机器人,它们都不会造成危险。

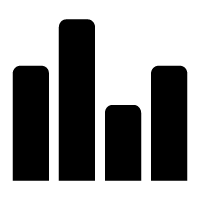
图中是驱动的VAMPs和其横截面。横截面显示了施加真空时收缩的内部空腔。(图片来源:哈佛大学维斯生物工程研究所)
要让机器人更好地配合并模仿人类,它们必须变得更加柔软和安全。哈佛大学的一个团队研发出一种新型执行装置,它能够利用真空吸力驱动柔软的胶制“骨骼”,能像真实的骨骼和肌肉那样动作。这个团队由George Whitesides博士带领,他是哈佛大学维斯生物工程研究所核心教员,同时也是哈佛大学艺术与科学学院Woodford L.and Ann A.Flowers校级化学和生化教授。
而且,它也同真实的肌肉一样柔软、减震,不论是对所处环境、同它们一起工作的人类,还是将来可能装备的机器人,它们都不会造成危险。这项成果于6月1日发表在《先进材料技术》(Advanced MaterialsTechnologies)期刊上。
“我们的执行装置在功能上模仿人类手臂的肱二头肌” 哈佛大学Kavli生物纳米科学与技术研究所(the Kavli Institute for Bionano Science and Technology at Harvard University)的主任Whitesides说道,“虽然也有其它柔软的执行装置研发出来,但这种执行装置在响应时间和效率方面与肌肉更像。”
在设计方面, Whitesides的团队采用了新方法,他们利用真空使执行装置缩小体积并弯曲。在传统工程师眼中,弯曲是力学不稳定的表现,并且是一种故障。但在这个项目中,研究人员利用这种不稳定来创建利用真空驱动肌肉的气动结构(vacuum-actuated muscle-inspired pneumatic structures,VAMPs)。之前的软执行装置是靠体积增大的加压系统驱动,而VAMPs可以收缩,这使它可以模仿真实的肌肉,并用于狭窄空间和许多方面。
包含软橡胶或人造橡胶的执行装置充满了像蜂巢那样的小型空腔。施加真空环境之后,空腔萎缩,整个执行装置随之收缩,产生动作。定制而成的内部蜂巢结构可以进行线性、转动、弯曲或组合运动。
“软橡胶制成的VAMPs能机器人更易驱动,”这项研究的第一作者Dian Yang说道。Dian Yang曾是正在攻读哈佛大学工程科学博士学位的研究员,如今,他已经是一名博士后。
研究团队认为,由VAMPs制成的机器人能够帮助不健全者或老人传递食物和商品,还能执行其它与服务业相关的任务。软机器人可以和人类共同工作也使得工业生产线更加安全、快速,产品质量更可控。
尽管关于VAMPs的复杂控制系统还没有研发出来,控制这种驱动器却很简单:施加了真空之后,VAMPs会收缩。它们可以用作满足环境或性能要求的有线或无线系统的一部分。并且,VAMPs可以避免故障,就算破了一个2毫米的洞,它还是可以运行。而当系统严重损伤时,它可以安全地停止运行。
“它不会爆炸,所以是十分安全的。”Whitesides解释道。
其它由电能或燃烧产能驱动的执行装置可能会对人类或所处环境造成破坏,而对于VAMPs,缺乏真空压力只会使它静止不动。
“这类自我修复的仿生执行装置为我们研发完全软性的机器人提供了另一种方法,它也许能缩小机器人和人类之间的差别,并在医疗和其它方面产生新的应用。”维斯生物工程研究所的创始主任Donald Ingber说道。他是一名医学博士,还是哈佛药学院血管生物学以及波士顿儿童医院血管生物学计划的教授,兼哈佛工程与应用科学学院的生物工程学教授。
原文链接:https://www.sciencedaily.com/releases/2016/06/160601132314.htm
翻译:吴苏栗
审校:赵昌昊










留言