




《张江科技评论》
开博时间:2019-06-06 14:03:00《张江科技评论》是由上海科学技术出版社与上海市张江高科技园区管理委员联合创办的一本科技评论类杂志。该刊报道评价国内外创新性科学技术的发展趋势及其商业价值,介绍上海在建设全球领先科创中心进程中的制度成果、技术成果、创业成果,推动产学研密切协作,促进科技成果转化,服务经济转型发展。




共融机器人与深海航行器前沿技术
2021-03-29 17:48:00 随着人工智能技术飞速发展,人工智能技术将与机器人产业深度融合。共融机器人是人类未来几十年技术进步与经济发展的重要方向与领域。
共融机器人是指能够与作业环境、人和其他机器人自然交互、自主适应复杂动态环境并协同作业的机器人。共融机器人是继工业机器人、智能机器人之后机器人技术的重要发展方向。深海航行器是典型的水下共融机器人系统,也称水下机器人。由于水下环境的复杂多变,以及受深海水压的影响,与其他工业机器人相比,深海航行器系统研究更加复杂,更具挑战性。
国内外共融机器人与深海航行器发展现状
机器人技术经历了半个多世纪的发展,已经深入到人类生产、生活的各个方面,给人类社会发展带来重大变革。美国于2011年启动了先进制造伙伴计划 (AMP),明确指出“下一代机器人将与人类操作者紧密合作,为产业工人、健康服务者、士兵、手术医生以及宇航员等完成复杂任务提供新的能力”,这是迄今为止国家级计划中对下一代机器人功能内涵最清晰的描述。欧盟早在2006年就成立了专门机构,对欧洲机器人技术的发展进行了长期、细致的研究,并于2014年1月颁布了机器人发展路线图,归纳出下一代机器人的核心特征:安全、自主的“人-机器人-物理世界”的交互。德国于2013年4月推出“工业4.0计划”,指出智能工厂、智能生产是第四次工业革命的主题,通过智能机器人、机器设备以及人之间的相互合作,提高生产过程的智能性。日本机械学会将机器人作为其10个重点发展方向之一。新的社会发展趋势表明,未来新一代机器人系统表现为更全面模仿人类,机器人与人之间更多的是一种和谐共存、优势互补的合作伙伴关系,与人共融成为新一代机器人系统的最本质特征。
由于共融机器人关键技术及其应用领域的特殊性,掌握其先进技术的发达国家长期对我国实行技术封锁,我国的相关研究以自力更生为主。2016年8月,国家自然科学基金委启动了“共融机器人基础理论与关键技术研究”重大研究计划,瞄准国际机器人研究前沿,围绕人-机-环境共融的机器人基础理论和设计方法,通过机械、信息、力学等多学科交叉,在刚-柔-软耦合柔顺结构设计与动力学、多模态环境感知与人体行为意图理解、群体智能与分布式机器人操作系统等方面取得创新性研究成果,有望占领共融机器人技术制高点,培养一批具有国际影响力的中青年学术骨干和带头人,提升我国机器人研究的整体创新能力和国际地位。
未来,世界各国将加速机器人技术的研发,特别是随着人工智能技术飞速发展,人工智能技术将与机器人产业深度融合。共融机器人被视为人类未来几十年技术进步与经济发展的重要方向与领域,各国纷纷出台各类中长期推进计划,如美国的国家机器人计划、欧盟的 Robotics系列计划、日本的《机器人白皮书》等。共融机器人的发展浪潮对我国科技工作者来说,既是机遇,也是挑战。
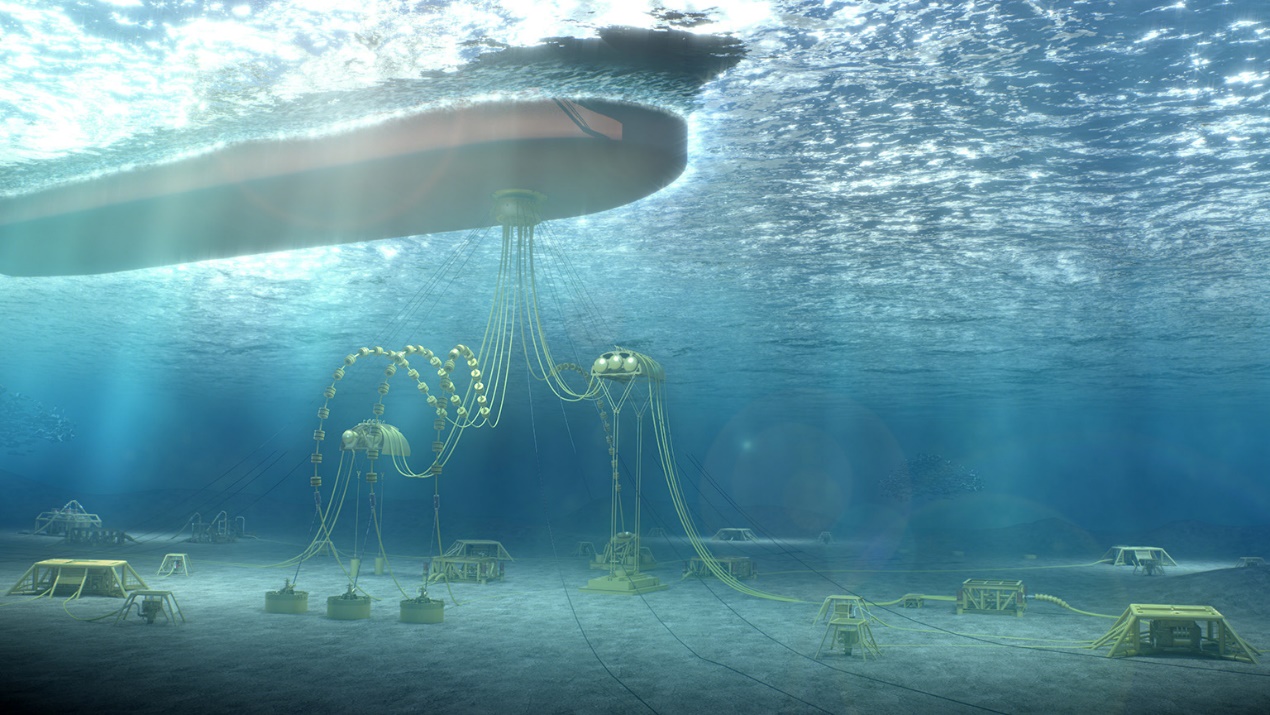
深海航行器是共融机器人的重要应用与发展领域,深海环境的特点是高压、黑暗、低温、缺氧等,人体和普通设备都很难在这种条件下完成工作,深海航行器成为开发海洋的核心工具。当前,以美国为代表的西方发达国家在深海航行器研究领域处于领先地位,其成果也在各类应用场景中崭露头角。2014年初,在马来西亚航空公司MH370失联客机水下搜救行动中,美国动用了多台“蓝鳍金枪鱼”号无人无缆水下机器人(AUV)进行4500米的深海大规模水下协作搜索。虽然未找到失联客机,但AUV成为深海跟踪搜索的首选工具,甚至是唯一选择,表明了美国等西方国家在这一领域的领先地位。最近,美国国防部高级研究计划局正在开展的“深海行动计划”(Deep Sea Operation Project,DSOP)是典型的多AUV共融跟踪系统,它涉及AUV与AUV之间、AUV与深海环境的融合,跟踪AUV能在水下6000米潜航,并秘密潜伏于敌对潜艇下方实现动态追踪监控。同时,它能够利用AUV之间的水声通信系统,当某个AUV出现故障时,通过系统之间的协调共融,由其他AUV代替故障AUV进行工作,从而提升系统容错搜索能力。

无缆水下机器人(AUV)
我国深海航行器基础理论前沿研究方向
深海航行器基础理论创新研究是其产业发展的基石。近年来,深海航行器领域在诸多方面取得了重要进展,如深海航行器水下仿生控制理论与技术、水下软体机器人的抓取技术、多航行器水下协作作业技术等。但是,真正实现有效可靠的应用与产业化,还有不少关键共性技术有待突破。当前,深海航行器基础理论研究前沿主要集中在以下几个方面。
● 深海航行器水下环境自主感知技术
水下图像处理是航行器水下环境感知的前提要件。与水上环境相比,无论是光视觉传感器还是声呐传感器,都存在水下成像效果差的缺陷。目前,无论是对声呐图像还是水下光学图像来说,均没有通用的处理模型和方法来适应所有水下环境,而且相关处理算法还存在实时性与准确性的矛盾。因此,针对水下特殊环境,急需研究出计算量小、既能满足实时性又能较准确提取环境信息的模型和方法,实现水下光视觉和声学图像的快速、准确处理。
● 深海航行器自主路径规划避障方法
航行器水下作业大多是在海底条件极其恶劣的情况下展开的,水下环境分布着大量的障碍物,包括礁石、海底火山、沉船和移动的冰山等,航行过程中必须安全避开这些障碍物,这是开展水下作业的必要前提。传统的路径规划方法主要包括可视图法、栅格地图法、自由空间法、拓扑法、模板匹配法等,大多只能用于解决静态障碍物环境下的路径规划与安全避障问题。水下环境是动态的,环境信息具有多变性和不确定性,因此,传统路径规划技术无法满足实际的水下路径规划需要。随着现代路径规划研究的不断发展,一些新的、适用于不确定动态水下环境的路径规划方法需要深入研究,如仿生智能路径规划方法、启发式搜索路径规划方法等。
● 深海航行器轨迹跟踪控制技术
水下跟踪控制是深海航行器最基本的水下运行状态。但是,目前几乎所有跟踪围捕研究报道均是跟踪围捕算法顶层设计与仿真,少见跟踪围捕算法的航行器底层动力学控制设计。实际上,任何跟踪围捕算法最终都要通过水下航行器的动力学控制实现,而且航行器驱动能力都存在一定的上下限限制,常规控制方法常常会出现跟踪控制律驱动饱和问题。因此,针对水下航行器有限驱动能力的轨迹跟踪动力学控制律设计是深海航行器轨迹跟踪控制亟待解决的核心技术之一。
我国深海航行器的研制进展
我国的深海航行器设计与研制可分为载人水下机器人(Human Occupied Vehicle,HOV),遥控机器人(Remotely Operated Vehicle,ROV)和无人无缆水下机器人(Autonomous Underwater Vehicle,AUV)三大领域。经过几十年自主研发的艰辛历程,我国的深海航行器从少量研制到成熟运行,在提高技术性能与国产化率等方面不断突破,部分单机性能与国外相齐,已逐渐成为探索海洋的一支生力军。
2017年,“深海勇士”号HOV在南海陆续完成全部海上试验任务,标志继“蛟龙”号HOV后,我国深海装备又添重器。4500米级“深海勇士”号HOV是在7000米级“蛟龙”号HOV基础上设计的,它最大的特点是国产化率远高于“蛟龙”号,主要体现在深海载人舱设计与建造、深海浮力材料、深海推进器系统、深海机械手这些大型核心部件均实现了国产化,实现了我国深海装备由集成创新向自主创新的历史性跨越,也为正在研制的全海深载人作业潜水器奠定坚实基础。2017年9月,深海科考型ROV系统的成功研制,填补了我国6000米级深海ROV空白,使我国跨入美国、日本、法国等世界上少数拥有6000米级ROV的国家行列。2017年12月,国家“十三五”重点研发计划“全海深无人潜水器AUV关键技术研究”正式启动,将研制能够探访位于海底11000多米马里亚纳海沟的AUV集成验证系统,向全球海洋最深处发起冲击。
关于我国深海航行器行业发展的建议
随着人类对海洋探索的不断深入,深海航行器已得到世界各国的高度重视,虽然我国起步相对较晚,但目前已经历了从“追赶”“跟跑”到“并跑”的过程。如今,伴随国家海洋强国战略的实施、人工智能技术的飞速发展和计算机技术的进步,作为人类深海探测与开发的重要工具,深海航行器的基础理论研究、关键技术攻关、相关应用系统的研发都迎来了巨大的机遇。在当前形势下,需要政府、高校科研院所及企业形成合力,通过政府的大力引导、高校科研院所的技术攻关、企业的应用示范等方面来推动深海潜水器行业快速发展。
● 加强基础理论与关键技术研究
抓住人工智能技术发展机遇,推进人工智能技术与共融机器人技术结合,在深海航行器技术系统中大量应用人工智能技术,如基于深度学习算法在水下声呐图像学习与水下环境感知方面应用、生物启发神经网络方法在深海航行器水下路径规划与轨迹跟踪控制方面应用等。
● 增强资金投入与应用推广力度
增强对深海航行器研发的投资力度,合理分配研究资源及经费,以具有实用意义的技术、产品、专利为导向,加大深海航行器系统的研发,特别是有广泛需求的无人航行器系统研发。进一步推进深海航行器系统在民用与国防军事领域应用推广,如水下搜救、深海搜索、深海勘探等领域。
● 重视复合型人才培养与搭建学术交流平台
人才培养是深海航行器行业发展的原动力。一方面,建议注重加强理论与研发兼顾的复合型人才培养。我国科研院校一般以发表研究论文作为人才评价标准,为了培养深海航行器行业优秀人才,建议调整培养方案,让学生在学习过程中直接面对研发实际问题,理论学习和实践操作并重。另一方面,鉴于深海航行器领域国际间及国内学术交流较少的特殊情况,建议搭建专门的学术交流平台与组织,如在中国海洋学会中增设水下航行器专业委员会等。
顾锡新,上海市中国工程院院士咨询与学术活动中心副主任。
文/顾锡新
本文来自《张江科技评论》






