《无线电》
开博时间:2016-07-01 14:43:001955年创刊,是国内电子科普领域创刊最早、发行量最大的知名杂志,累计发行量超过3亿册,倡导科普、兴趣、实作、分享的办刊理念。




我的第一个机器人六足甲虫——《无线电》2013.08
2013-09-30 10:01:52拥有一个机器人恐怕是很多人(尤其是电子和机械爱好者)少年时代的梦想,我也不例外。小时候没有制作条件,梦想很难实现,而如今已为人父,而且有了自己的工作室,这个愿望就变得尤为强烈起来。适逢“矿石收音机论坛”举办“第四届DIY大赛”,于是就决定动手制作一款机器人来参赛。
之所以选择六足机器人作为目标,是因为其制作难度介于四足机器人和两足人形机器人之间,适合具有一定动手能力和加工条件的爱好者制作。整个制作过程包含了机械制图、数控加工、电气安装、软件调试等一系列的工作。由此可以看出,机器人是包含了机、电和软件在内的综合工程,需要制作者有一定的专业知识和经验基础。以下即对整个制作过程进行简单阐述,如果能够对广大爱好者有所启发,将会令本人倍感欣慰。
制作原理
提到原理,我们不得不说一下仿生学,要想让机器人工作,必须对所仿制的动物(甲虫)进行了解,要彻底弄明白甲虫的每一个动作中6条腿的运动方式。通过对其动作进行分解,从而得到整个运动过程中的每一个细节动作。只要我们把这一个个的细节动作通过机械控制的方式在机器人上展现出来,然后再连贯成一整套的动作,最后得到的就是一个连续运行的机器爬虫。这有点像动画片的制作,先做出一幅幅的分解图画,然后连续放映,就得到了“活动”的影片。
本次制作的六足甲虫机器人的工作原理其实很简单,所有的活动关节均为舵机控制,整机18个舵机又集中在一块32位舵机控制板上。舵机控制板通过单片机与上位机软件进行连接。制作者通过软件对机器人的每个动作进行调整,从而得到自己想要的运行姿态。最后把所有姿态整合并下载到舵机控制板内,机器人就会按照既定的姿态做出诸如前进、后退、左右转动等动作。
元件的选择
元件的选择历来都是制作中的关键,元件质量的好坏决定了整个制作的成败。本制作中所有的骨架材料选择的都是2mm厚的拉丝铝板,既轻便,强度又好。舵机是本制作中的一个关键元件,所有动作的实现全靠它。舵机的选择要求本身重量要轻、输出力矩要大,但是一般输出力矩大的舵机本身重量都不轻。经过权衡我选择了比较有代表性的MG995舵机,此舵机为生产多年的成熟产品,便宜而易得。
舵机控制板无特殊要求,可任意选择,但控制点数一定要大于自己需要使用的舵机数量。_W_サ冒_・`本机一共使用了18个舵机,所以选择了一款32路控制的板子。购买控制板的时候一定记住向销售者索要上位机软件,不然将会无法使用。
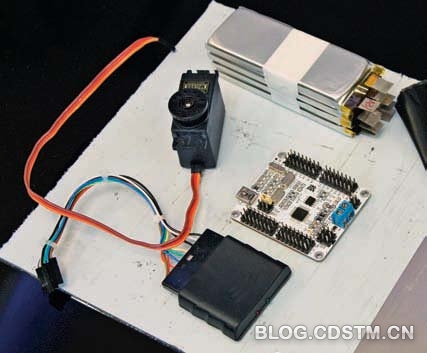
本机的电源一定要选择锂铁电池——重量轻、容量高。本机选择的是4块5Ah电池,采用两并两串方式组成7.4V/10Ah电池组。本机控制部分的主要材料如图1所示。
图1 控制部分的主要材料
全文详见《无线电》2013.08