《无线电》
开博时间:2016-07-01 14:43:001955年创刊,是国内电子科普领域创刊最早、发行量最大的知名杂志,累计发行量超过3亿册,倡导科普、兴趣、实作、分享的办刊理念。




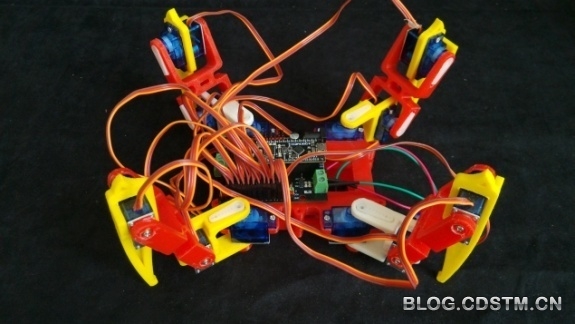
3D打印的4足机器人-脱机版
2015-12-29 10:49:38陈杰
在2015年7月的杂志上,我们已经向大家介绍一个3D打印的4足机器人的制作过程,不过遗憾的是,当时的4足机器人不能脱机运行。那么今天就让我们来弥补这个缺憾,让4足机器人甩开电脑,走起!
项目器材
|
序号 |
名称 |
数量 |
|
1 |
Arduino Nano |
1 |
|
2 |
Arduino Nano I/O扩展板 |
1 |
|
3 |
HX11A塑料齿9g舵机 双轴设计 |
12 |
|
4 |
9V电池转换插头 |
1 |
|
5 |
品胜9V/250mAh镍氢充电电池 |
1 |
|
6 |
7.4V/2200mAh锂电池(带充放电保护板) |
1 |
中标:机械结构部分
小标:用3D打印机打印出机器人的机械结构
4足机器人由身体(上、下盖)、关节、连接件、脚等几部分构成,为了保证打印件强度,打印填充率设置为50%,suppott type设置为touching bulidplate,plateform. adhesion type设置为brim。
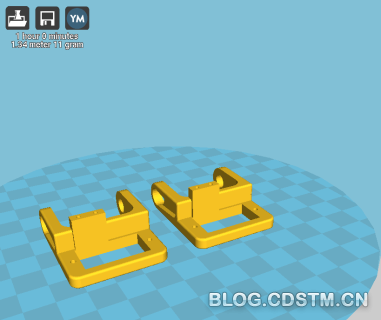
身体由上、下两部分组成,用于存放7.4V电池和主控板。在Cura软件中设置打印参数时,请务必按照图1、图2所示的方向设置,以确保打印效果。
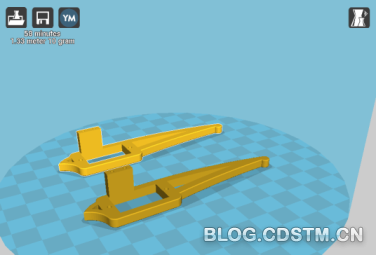
关节分为左、右两组,每组两个相同部件,共4个打印件。打印时要各打印2份,如果想一次打印完成,可以按如图3、图4所示设置:在Cura中选中关节模型,单击鼠标右键,在弹出的快捷菜单中选择“Multiply object”,接着在“Number of copies”对话框中设置1,这样就会出现两个一模一样的模型了。
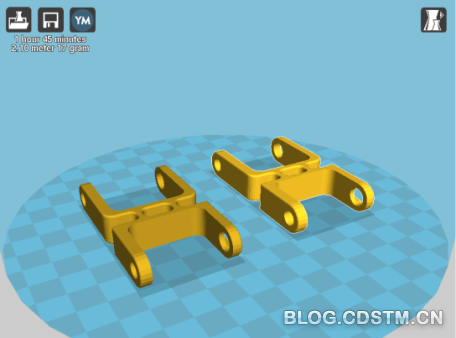
关节连接件用于连接关节和脚,按上述方法设置,同时打印2份,如图5所示。
四脚也分为左、右两组,按图6、图7所示方式每组同时打印2份。
小标:舵机测试
在组装舵机与3D打印部件前,一定要确定所用的舵机在电气性能上是完好的,分别将舵机与Arduino的数字口2连接,刷入下列程序,你将看到舵机在0°至180°之间来回摆动。
#include
Servo myservo;
int pos = 0;
void setup() {
myservo.attach(2);
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) {
myservo.write(pos);
delay(15);
}
for (pos = 180; pos >= 0; pos -= 1) {
myservo.write(pos);
delay(15);
}
}
(未完。全文详见《无线电》杂志2015.12)