图片来源:Devrimb Getty
站在巴布依诺大道沿途的任何角落处不难分辨出哪些是当地人哪些是旅行者。迷茫的游客们,拿着旅行指南,驾驶着踏板摩托和鸣笛的菲亚特汽车到处乱窜。然而当地的居民们却相当随意地在街上穿行,看上去十分自信和冷静。类似的场景并不只发生在罗马,世界上所有的城市,当地居民比偶然来访的旅行者要更熟悉当地司机的驾驶习惯。与偏远的乡村小路不同,在城市中走路和开车都是社会作用,只有当地的居民才了解他们所在城市的行为风俗。
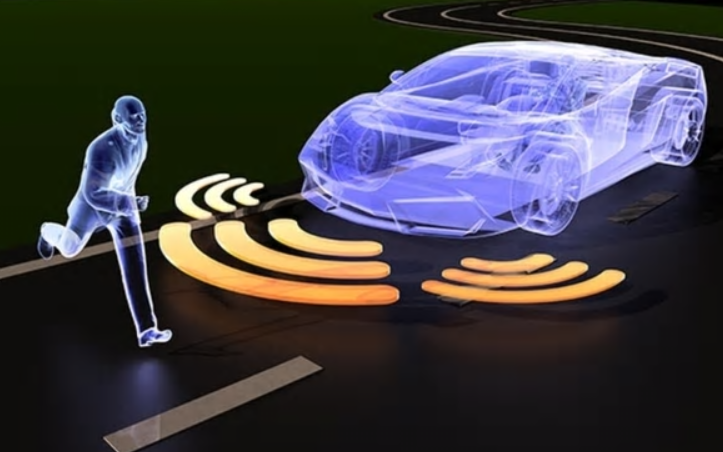
一个巨大的改变将要到来。了解其他道路使用者的心理,例如什么时候行人会避让,对于不是由人类驾驶的汽车过马路并没有帮助。无人驾驶的时代将要来临,预计2030年无人驾驶汽车将十分普遍。作为驾驶人员,无人驾驶汽车的行为方式与人类驾驶汽车不同,这些无人驾驶汽车会被编程设置避免撞到行人。而随着交通事故的减少,道路将变得更加安全。这就是新技术背后的驱动力。但是,当行人发现汽车的这种特点,就会加以利用。这时效果可能是戏剧性的:交通不仅不会变得有序,反而会变得更混乱。
最近发表在《规划教育与研究期刊》(Journal of Planning Education and Research)的一篇论文,探究了人类和无人驾驶汽车之间关系是否会改变道路的行驶规则。作者Adam Millard-Ball首先解释了行人决定何时过马路的模型。每一次过马路时行人都在内心权衡:是尽快的过马路同时承担可能被撞到的风险,还是花费未知的时间等到没有车的时候再过马路,或者干脆换一条路走。司机也会权衡是否避让行人。这简直是过马路时司机和行人之间的懦夫困境。直观来看,行人作为发生事故时更容易受到伤害的一方会先避让,他们的行为受到社会规范的约束。但当交通拥堵时,或者遇到不懂当地交通规则的旅行者时,司机一般会避让。但如果当地的规则总是行人等待车先过,那等车过后再过马路就比直接过马路风险更低更行得通了。
但如果是行人和无人驾驶汽车之间,懦夫困境的情况就截然不同了。与人类驾驶的汽车相比,无人驾驶汽车的行为永远都是可预知的。无人驾驶汽车可不会偶尔瞥一眼手机,不需要分开后座正在打闹的孩子,更不会一边控制方向盘,一边吃在免下车快餐店购买的汉堡。而且无人驾驶汽车的程序不会按照当地的风俗设定,汽车都被设定避免撞到行人。行人会有心理上的优势,不论是在转弯处还是在街道上,不再主动让车。因为他们确信汽车会避让,就算违反了交通规则,他们也可以随意的穿过马路。行人会利用汽车的避让随意穿过马路。
Millard-Ball列出了行人与无人车之间交互的三种可能,这有可能改变未来道路交通。第一种可能是行人至上。在这种情况下,如果要去市中心,步行就可以。你的无人驾驶汽车可以把你送到郊外,但要是到市区去交通效率就会很低,因为行人随意过马路不会受到惩罚,汽车就要不停的避让。随着市区这种行人的增多,步行会比开车更方便。
第二种可能性是:随着监管措施的推行,行人仍会在过马路前思考。并不是考虑是否存在被汽车撞到的风险,而是考虑这样做是否会收到罚单。将新的法规和基础设施相结合以此规范行人的行为,保证行人和无人驾驶汽车之间不会有冲突。新的法规着重于给汽车和行人各自的空间,以此来提高道路的行驶效率。再出现交通事故时,由行人而不是汽车制造商来承担主要责任,这样会进一步制约行人的交通规范。
最后,根据驾驶员的情况,自动驾驶造成的额外时间消耗已经超过了其给乘客带来的好处。虽然可以在上班路上随意检查邮件、参与电话讨论会议或者看Netflix的电视节目,但不值得花费更多的时间抵达目的地。实际上,保持在过马路这个场景下的懦夫困境会超越驾驶带来的便捷性。但是,面向行人的设计只在大多数都是无人车的情况下说得通。最终,社区如何适应和纳入无人车取决于相关的政策、法律和技术现状。无论是以上哪一种可能,未来的交通行业取决于人类利用无人驾驶的能力。
翻译:贾文铎 审校:王舟