来源:哈佛大学威斯仿生工程研究所
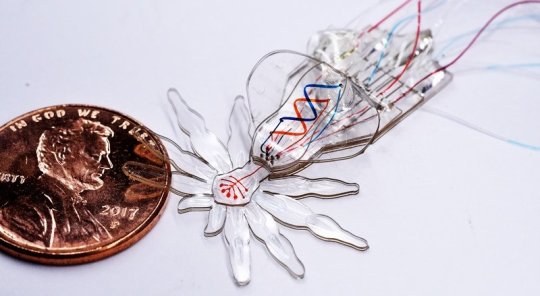
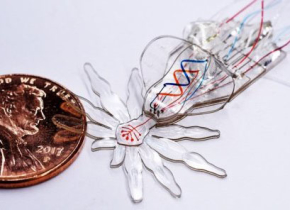
一种新的制造方式创造了具有微米特征的毫米大小的柔性机器人。例如图中有着可移动肢体、彩色眼睛和彩色腹部的微型柔性孔雀蜘蛛机器人。
机器人专家设想着这样的未来:柔性、具有动物形状的机器人可以安全地用于人类难以进入的自然和人造环境,比如说在进行精细外科手术的人体内部,或者对于人类和硬性机器人来说过小、难以预测和危险的空间。厘米大小的柔性机器人早已被发明出来了,但是在之后的很长时间里,能在更小的尺度上活动和操作的多功能柔性机器人的制造遇到了瓶颈。
来自哈佛大学威斯仿生工程研究所(Harvard's Wyss Institute for Biologically Inspired Engineering)、哈佛大学工程与应用科学学院(SEAS: Harvard John A. Paulson School of Engineering and Applied Sciences)和波士顿大学(Boston University)的研究团队现已通过新的综合制造方法,突破了瓶颈,实现了有微米特征的毫米大小的机器人的设计制造。为了展示新技术的能力,他们制造了一个蜘蛛软性机器人——受到毫米大小的澳大利亚孔雀蜘蛛启发——由一种柔性材料制成,有外形、活动和颜色特征。该研究发表在《新型材料》 (Advanced Materials)上。
“最小的柔性机器人系统仍然非常简单,一般只有一个自由度,这意味着它们只能完成一种特定的变形或运动,”该研究的作者之一,Sheila Russo博士说。Russo在哈佛大学威斯仿生工程研究所和哈佛大学工程与应用科学学院Robert Wood的团队中作为博士后研究员时帮助启动了这个项目,现在在波士顿大学当助理教授。“我们通过融合三种不同的制造技术研发出了新混合技术,并借此制造了仅由硅橡胶制成的有18个自由度的柔性蜘蛛机器人,包含了结构、运动和颜色的变化,还有在微米尺度上的微小特征。”
Wood博士,是威斯学院仿生柔性机器人平台(Bioinspired Soft Robotics platform)的核心教员和领导之一,还是哈佛大学工程与应用科学学院的工程和应用科学方面的Charles River教授(Charles River Professor of Engineering and Applied Sciences)。“在柔性机器人设备领域,这种新的制造技术可以在这种小尺度上实现类似刚性机器人表现出的复杂性和功能。在未来,它还可以比刚性机器人更好地帮助我们模拟和理解小动物结构和功能的关系。”他说。
在他们的“可重新配置气压/液压的微流体折叠(MORPH)”(Microfluidic Origami for Reconfigurable Pneumatic/Hydrolic)设备中,团队人员第一次使用了柔性光刻技术,制造了12层的弹性硅胶,组成了柔性蜘蛛的材料基础。利用激光微加工技术,每一层都按照模具精准切出,然后与下面一层结合,形成柔性蜘蛛大致的3D结构。
使这个半成品变为成品的关键,是在每层中预置的中空的微流体管道网络。利用第三种称之为注射诱导自折叠(injection-induced self-folding)的技术,用外部的光固化树脂密封其中一组集成微流体管道。这导致单层硅胶和相邻的硅胶层局部弯曲成最终构型,当树脂变硬后定型为它们的最终结构。例如,用这种方式,柔性蜘蛛胀大的腹部和向下弯曲的脚成为固定的形状。
“我们可以通过调整不同层上与管道相邻的硅胶材料的厚度和相对稠度,或者通过在与通道不同距离处进行硅胶层切割来精确地控制这种像折纸一样的折叠过程。在加压过程中,管道就像制动器一样形成永久性的结构变化,”第一通讯作者Tommaso Ranzani博士说。他在Wood的团队中作为博士后研究员开始了这项研究,现在也是波士顿大学的助理教授。
剩下的一套集成微流体管道作为附加制动器,通过流动的彩色液体为眼睛着色并模拟孔雀蜘蛛腹部的彩色花纹,还可以在腿部结构产生类似于爬行的运动。“第一个MORPH系统是通过简单的整体程序生产的,可以在几天内工作,在设计优化工作中也容易重复使用,”Ranzani说。
“MORPH方法为专注于研究柔性机器人在医学方面应用的研究员开拓了新领域,机器人更小的尺寸和更高的灵活度可以为内镜和微创手术提供完全不同的新方式。”威斯学院创办主任、医学博士(M.D.)、哲学博士(Ph.D.)Donald Ingber说。他也是HMS血管生物学和波士顿儿童医院的血管生物学项目的Judah Folkman教授,以及SEAS的生物工程教授。
翻译:王嘉钰
审校:胡佳仪