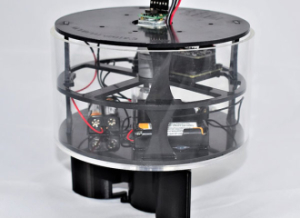

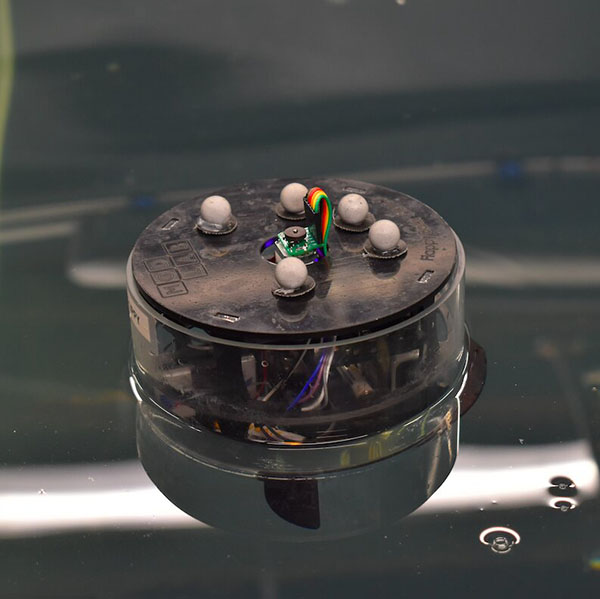
Modboat:研究者制作的一种低成本机器人船。 (图片来源:Knizhnik & Yim)
最近,宾夕法尼亚大学GRASP实验室的研究者设计了一种可用来监测海洋或进行海洋作业的机器人船,它被称为Modboat。这种低成本的水上机器人可以仅凭借一个电机便在水中畅游。该项研究在arXiv上发表的一篇预印论文中提出。
“这个项目的最初想法来自以色列理工学院(Technion)的一个团队在2015年撰写的一篇论文。”Gedaliah Knizhnik是这项研究的研究人员之一,他告诉TechXplore,“我的实验室的方向是探索低成本的机器人技术,大家立刻接受了这个想法。我们以前在水上机器人方面有过一些经验,因此这是一个深入了解的好机会。”
这项研究由Knizhnik和他在宾夕法尼亚大学的同事们共同进行,它的长期目标是创造一批低成本的机器人船,它们可以作为一个团队完成任务,而不是单独完成任务。他们最近的研究是朝着这个方向迈出的第一步,完成了一种既高效又经济的水上机器人设计。
研究人员发明的机器人Modboat相当简单,但它能在水中高效地移动。机器人有一个主体和两个鳍肢(flippers)。它用一个单独的电机来回摆动身体,让它在水中划水前进。
机器人可以调整电机左右摆动身体的速度和每个脚蹼划水的力度,朝特定的方向操纵。与研究人员在以色列理工学院开发的机器人不同,Modboat独特的设计也可以使它能够在团队中很好地工作。
水中的Modboat。 (图片来源:Knizhnik和Yim)
“我们的机器人不像其他机器人那样擅长游泳,但这种设计是独一无二的,因为当惯例认为至少需要两个电机时,它只使用一个电机。”Knizhnik解释说,“这使得机器人有低廉的制造成本,因此我们可以制造大量机器人,并补偿其较弱的游泳性能。”
研究人员在一系列实验中对他们的机器人进行了评估,发现虽然它的表现相当好,但它很难沿直线游泳,原因是它对重心(center mass)的位置有很高的敏感度。
这种灵敏度来源于偏置质量在机器人上产生的非零侧倾角(non-zero roll angle),进而增加了其各个鳍肢推力的不对称性。在论文的最后,研究人员提出了一种替代的设计策略,可以降低机器人对侧倾角范围的敏感性。
“让机器人更加便宜是我们让它大范围应用的思路,但低廉的机器人的性能往往比昂贵的同类机器人更低。”Knizhnik说道,“在这项研究中,我们已经展示了如何采取独特的设计方法,并应用于现实,由此来使机器人拥有更强的团队协作能力。目前这一功能还没完成,但我们已经完成了准备工作。”
虽然研究团队研发的低成本水上机器人前景良好,但其设计仍需改进后才能大规模应用。在未来,它可能会为研发售价低廉的自动化机器人船铺平道路,这些船可以部署在舰队中,从而更快、更有效地完成海上任务。
Knizhnik补充说:“既然我们已经证明了这种设计可以很好地工作,我们需要让它游到我们真正想要的地方。我们正努力使它遵循指定的路径,以便我们可以将其用于传感器放置、测量等多个领域。”
翻译:刘一尘
审校:郝豪
作者:Ingrid Fadelli
引进来源:Tech Xplore