《无线电》
开博时间:2016-07-01 14:43:001955年创刊,是国内电子科普领域创刊最早、发行量最大的知名杂志,累计发行量超过3亿册,倡导科普、兴趣、实作、分享的办刊理念。




一起来认识相扑机器人-《无线电》2014.04
2014-04-28 16:39:18自主式相扑机器人的解析与制作 (1)
说到日本的相扑比赛,大家应该比较熟悉,脑海里都可以联想到两个高大的日本相扑手纠缠在一起,试图把对手扭倒在身下,而自己却不会出边界线(见图1)。同理可知,机器人相扑比赛即是两个相扑机器人互相角力,将对方铲翻或推出边界线外(见图2)。
本文所介绍的均为自主式相扑机器人,与遥控式相扑机器人的区别是增加了各式各样的传感器,用于识别周边环境和对手的信息,对微控制器中算法和策略的要求较高,更加智能化和自主化。
机器人相扑比赛简介
机器人相扑比赛起源于日本,我猜是因为相扑是日本人特别喜欢的一项传统体育运动;同时日本也是科技强国,有着非常先进的机器人技术,便把相扑引入到了机器人比赛中。
机器人相扑比赛的规则比较宽松,给参赛者留有较大的发挥空间,但是由于在相扑比赛中,机器人的重量和底面积对比赛结果影响很大,例如一个自重500g的相扑机器人一般情况下很难推动一个自重5000g的机器人,所以相扑比赛一般根据相扑机器人的尺寸(长、宽、高)和重量来划分级别,具体的要求如表1所示。
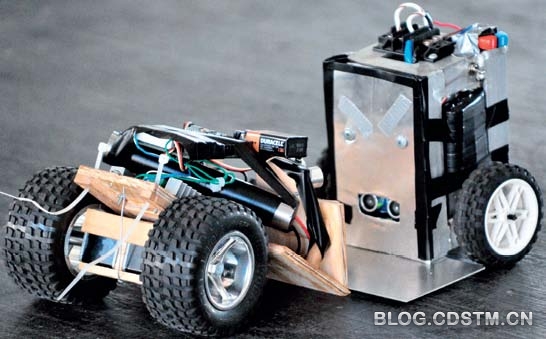
在大型和小型机器人的要求中,不限制机器人的高度,是因为机器人越高,重心越高,越容易被铲翻,这是一个劣势。在微型和极小型机器人的要求中,由于重量要求很轻,则对机器人的高度作了限制,以保证比赛的公平性。相扑比赛开始之前,需要对机器人的尺寸和重量进
行测量(见图3)。
机器人相扑的比赛场地是高5cm,直径为154cm的黑色台面,台面边缘有5cm宽的白色边界线。这种以黑、白两色构成边界线的比赛场地便于相扑机器人利用低成本的光电传感器进行边界识别,以保证机器人行走在规定区域内。两个相扑机器人之间的间隔不小于20cm,且相背而行。
比赛一般采用小组积分赛+决赛的形式进行,首先通过抽签来分成几个小组,然后进行小组循环赛,每两个相扑机器人之间均进行3局比赛,赢一局积2分,平一局积1分,负一局积0分,小组积分第一名直接晋级半决赛,最后进行半决赛和决赛。
■ 图1 日本相扑比赛
■ 图2 机器人相扑比赛
级别高度宽度长度量
■ 图 3 称量机器人的重量
未完。。。
全文详见《无线电》2014.04