





相比单独工作的机器人,群体性的机械结构体协同工作所能够取得的效率更高
(图片来源:pixabay)
最近,《自然》杂志上发表了一种新型机器人设计,设计者是来自麻省理工学院计算机科学与人工智能实验室的研究团队。
设计优秀的机器人来协助人类进行各种重复性工作一直是相关工程师们努力的目标。相比于单独工作的机器人,似乎群体性的机械结构体协同工作所能够取得的效率更高。麻省理工学院设计的这种机器人正是以协同工作作为主要的设计方向。
尽管机器人有各种类型,不过像是科幻作品中我们所常见的那些人形机器人反而在现实中不太常见。在实际工程应用里,工程师会去除掉机器人身上不必要的部分,仅针对于某种行为机制进行设计,留下高度简化的机械结构。这些机器人最后大多呈现出性能最优化以后的型态。
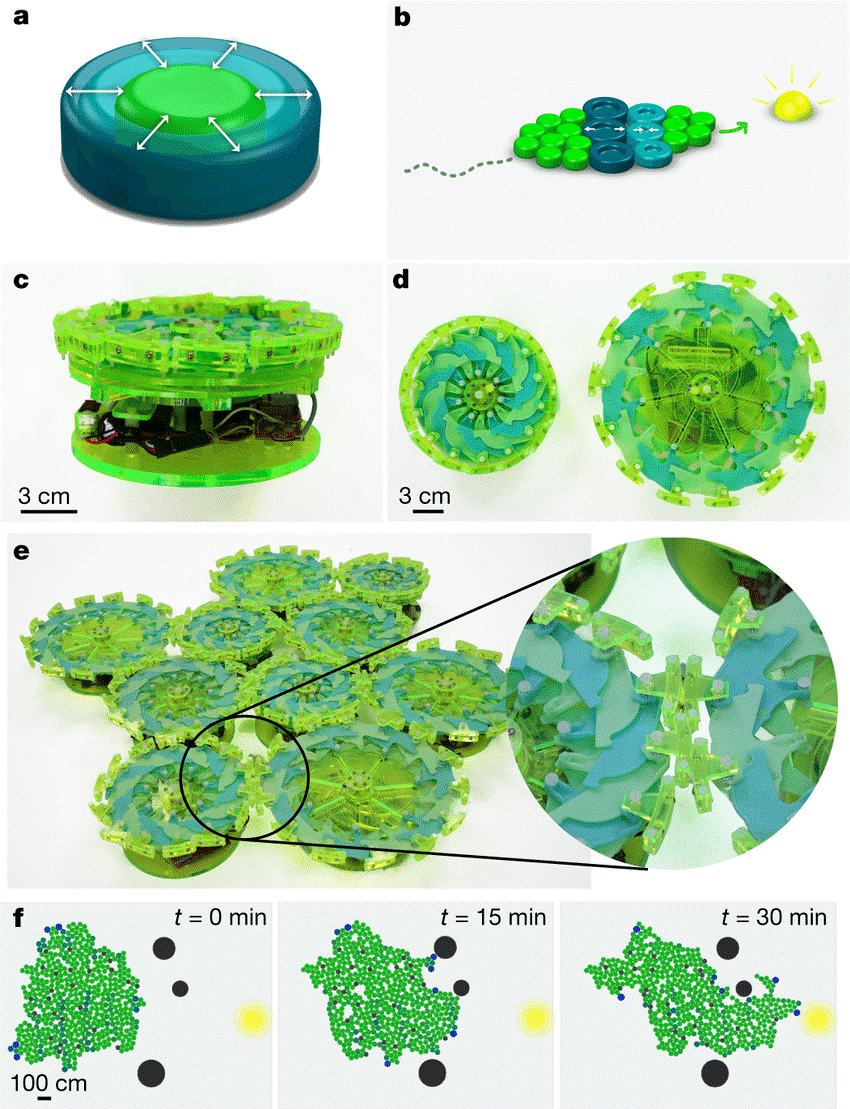
麻省理工学院研究团队设计的新型机器人及其工作原理示意图
(图片来源:见参考文献)
麻省理工学院研究团队设计的这种新型机器人与其说是机器的 “人”,不如说更接近于机器“细胞”。这种新型机器人由数十个环形单元构成,每个环形单元直径为23.5厘米。这些环形单元具有感光装置、简单的电子元器件和可以相互吸引或分开的磁力。
研究人员希望让这种新型机器人集体行动,而非单独进行工作。研究人员认为,这样的设计能让机器人工作更加高效和稳定。环形单元在接收到光强信息后,会通过装置传递给周围的单元,各个单元经过统一的算法,确定接下来的行为。每一个环形单元都不需要依靠于某一具体的“决策者”进行行动,而是根据外部环境协同作业。
在测试实验中,研究人员放置了24个环形单元组成的集群。当外部光源出现时,这套系统开始以惊人的方式向其移动。整个行为过程如同细胞聚集移动一样,环形单元集群会产生进行收缩还是扩张的判断。研究人员具体观察发现,首先接收到光源的环形单元将信息传递给周边相邻的单元,接着在磁力与机械结构的作用下,环形单元按照事先设定的算法规则逐步向外部光源移动。

协同工作具有很大的优势,系统不会因为出现一个单元的损坏而导致崩溃。
(图片来源:pixabay)
相比于单个机器人的工作,协同工作具有很大的优势。首先,它的工作容错率很高,不会因为一个单元的损坏或错乱导致系统崩溃。在计算机模拟测试中,10万个环形单元的工作结果里,即使有20%的单元发生故障,系统也仅仅是下滑一半的移动速度,移动过程并没有被打断。
其次,这样的系统对于工作环境有很强的适应性,集群算法会得出最优的方案进行行动。并且,在维持简单的工作原理下,人们可以将这些单元的功能、大小、形状进行更改,以达到各种不同的使用要求,满足各类实际应用的需要。例如,把追踪光源的目标变为躲避障碍物,或是推动物品,理论上都是可行的。将各个单元缩小后,还能应用到医药领域,作为药物输送的载体。另一方面,这种新型机器人还能进入到危险的区域进行探索、测量、采集、搜救以及运输等等。利用这种集群拟态,它们能够应用到许多不同的方面,适应不同的环境,以完成不同的任务。
不过,这些机器人目前还处在实验阶段,在现实的工作环境下,这种适应力是否需要调整、算法是否会产生错误的决定,以及如何及时进行自我纠错,这些都还有待研究人员后续的分析与测试。显然,在实现构想之前,研究人员还有很多问题需要解决。
原创稿件
制作 叶鹏飞
审校 赵峥 北京师范大学物理系教授
参考文献:Li, S., Batra, R., Brown, D., Chang, H.-D., Ranganathan, N., Hoberman, C., . . . Lipson, H. (2019). Particle robotics based on statistical mechanics of loosely coupled components. Nature, 567, 361-365.

京ICP备11000850号 ![]() 京公网安备11010502039775号
信息网络传播视听节目许可证0111611号
国家科技基础条件平台
京公网安备11010502039775号
信息网络传播视听节目许可证0111611号
国家科技基础条件平台
© 2011- 版权所有:中国数字科技馆 未经书面许可任何人不得复制或镜像











